“Τhe Frequency Shift Chirp Modulation (FSCM)”
Diploma Theses for the Academic Year 2023-2024

Available |
Brief Description:
The Low Power Wide Area Networks (LPWAN) are emerged to troubleshoot connectivity issues in the field of Internet of Things (IoT). In this direction the LoRaWAN system adopts, for its physical layer LoRa, the FSRC modulation. The proposed diploma thesis targets the analysis and study of the Lora modulation/demodulation processes. The performance of the FSCM modulation, regarding AWGN and Frequency Selective channels, will be assessed via simulations using the Matlab platform.
Required background knowledge: Digital Signal Processing, Wideband Communications, Telecommunication Systems Design, MATLAB, C/C++, Python
Place: ZB203 – Research Laboratory TelSiP
Supervisor: Dr. Evangelos Zervas, Professor
Student: –
“Smart energy monitoring and management based on Internet of Things technology in autonomous (off-grid) homes”

Brief Description:
Climate change is one of the most important challenges facing our planet today. Greenhouse gas emissions from the burning of fossil fuels gradually lead to an increase in the average temperature of the planet, melting of ice at the poles, rising sea levels and other catastrophic effects. To meet this challenge, energy production and consumption must be properly managed. Autonomous houses that are not connected to a fixed public electricity grid, mainly use photovoltaic systems with batteries and are an important solution to this challenge. Photovoltaic panels take advantage of solar energy to produce electricity, reducing the need for the use of fossil fuels. This has several positive effects, such as the reduction of CO2 emissions, increased energy independence of consumers, decentralized energy production, reduced need for electricity transmission lines, low installation maintenance costs, etc. The creation of more and more autonomous homes, which use photovoltaic systems with batteries, is important for reducing the negative effects of climate change and creating a more sustainable society.
In this context, this thesis focuses on the way such systems should be properly dimensioned, as well as on methods to improve the use of the produced and stored energy. In order to achieve the intelligent management of electricity, it is necessary to monitor the energy produced and consumed using smart meters. The collection of the data of the produced, stored and consumed electricity will be stored in time series databases (TSDB – Time Series Databases), while appropriate processing will be carried out in real time, in order to achieve optimization of the system performance. In addition, graphs will be implemented that will display in real time and notify the users for the energy produced and consumed in their home. Finally, an attempt will be made to assess the contribution of the use of tools and technologies such as Internet of Things and Cloud Computing, in order to improve the energy efficiency of an autonomous home.
Required background knowledge: Photovoltaic Systems, Embedded Systems, RPi, Internet of Things, Cloud Computing, Docker, InfluxDB, Grafana, Telegraf, MQTT, ML, Python
Place: ZB203 – Research Laboratory TelSiP
Supervisor: Dr. Grigorios Koulouras, Associate Professor
Student: Apostolos Klis
“Design and Implementation of a Web Application for Breast Tumors Classification through Convolutional Neural Networks”
Brief Description:
The rapid growth of Artificial Intelligence (AI), coupled with an increase in computational speed, as well as the precision of machine learning models nowadays, has benefited several sectors, such as the medical and biomedical technology field. Specifically, image and pattern recognition through Deep Learning (DL), along with Neural Networks (NNs) being trained on large datasets, have brought revolutionary changes to the recognition and categorization for diseases of all kinds. The proficiency of Deep Neural Networks in pattern recognition and precise classifications that often surpass human accuracy enables the correct prioritization of critical cases and effective addressing of complex medical challenges.
As part of this Thesis, an Artificial Intelligence model will be developed using Convolutional Neural Networks (CNNs) for identifying breast tumors from ultrasound images and then characterizing them as benign or malignant using the Tensorflow and Keras libraries. Additionally, a web application that emphasizes in user experience and easier access for everyone will be developed using Python and ReactJS. The autonomy offered by the web application, combined with the ability to interact through mobile phones, will provide a comprehensive solution for direct detections and will ultimately offer a valuable tool for the diagnosis and monitoring of breast cancer.
Required background knowledge: Machine Learning, Neural Networks, Python, Keras, TensorFlow, Flask, ReactJS, HTML, CSS, Cloud Computing
Place: ZB203 – Research Laboratory TelSiP
Supervisor: Dr. Grigorios Koulouras, Associate Professor
Student: Christopher Kormpos
“An online platform for micromobility vehicle sharing services”

Assigned |
Brief Description:
As the nature of current urban transport in most cities of the world is evidently unsustainable, concerted efforts are being made by developed nations to orient the mobility sector towards sustainable development. In our country, a law on Sustainable Urban Mobility – Micromobility (4784/2021) has recently been enacted that describes this model in detail. Modern forms of mobility – micromobility are more environmentally friendly, since they significantly reduce exhaust gas emissions into the atmosphere, as well as traffic congestion in cities. Included in those, are electrification (electro mobility) and shared transport. The modern term micromobility describes the transport options of civilians for small-scale distances. In modern cities, micromobility vehicle sharing services are growing at a rapid pace, thus increasing the user’s options.
The purpose of the Diploma Thesis is to understand the importance of sustainable urban micro-mobility and there will be an effort toward that direction to contribute substantially in its development. Therefore, as part of the Diplomatic Thesis, an integrated system and a WebApp will be designed and implemented, for the monitoring and management of a micromobility vehicle fleet.
The Thesis will be separated into three parts. In its first part, a prototype hardware system will be designed, which will be integrated into every micromobility vehicle and will use modern IoT technologies (e.g. LoRaWAN) to communicate with the platform. Emphasis will be placed on the reliability and security of communication. In the second part, the development of an online platform for the management and sharing of micromobility vehicles will take place. At this point, the student will study and develop the required algorithms. For example, in the instance of electric scooters sharing, there is a necessity for calculating the optimal routes for their collection and recharging their batteries. In that case, optimization algorithms will be studied, such as the well-known Traveling Salesman Problem (TSP). Lastly, in the third part, testing and monitoring of the integrated system’s proper functionality will take place.
Required background knowledge: IoT, LoRaWAN, MQTT, Linux, Docker, Python, Django, Flask, NodeJS, Databases
Place: ZB203 – Research Laboratory TelSiP
Supervisors:
Dr. Grigorios Koulouras, Associate Professor
Dr. Panagiotis Tsiakas, Lecturer
Student: Angeliki Pahopou
“An interactive learning platform for Docker technology”
Assigned |
Brief Description:
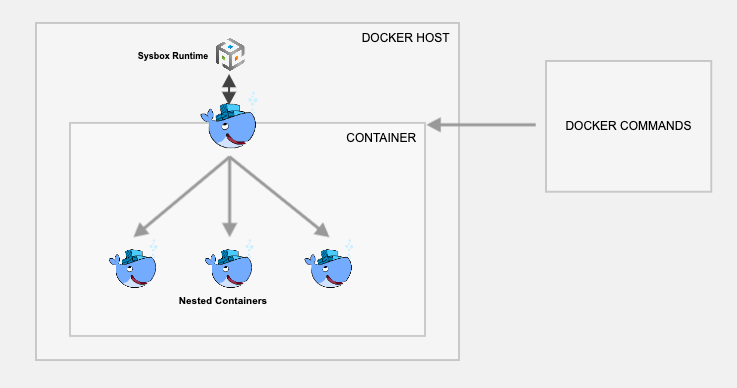
Modern cloud-native applications are usually built as microservices using containers. Microservices architecture, refers to an architectural style for developing applications. Microservices architecture have replaced, both the monolithic architecture and Service-Oriented Architecture (SOA). In the modern IT world, technologies for isolating microservices in Containers, such as Docker, are being developed.
The purpose of the current Diploma Thesis is the design and implementation of an interactive platform for the proper training of the future developers that are interested in the development of microservices with Docker technology. To achieve this goal, a Python framework (e.g. Django or Flask) will be used to develop an online interactive course web application. A web “terminal” (cli – command line interface) in bash shell will be integrated into the platform, where the trainee will have the opportunity to tryout docker technology commands. At the end of each module, as well as at the end of the whole course, there will be interactive reinforcement questions for the evaluation of the learner, in the form of dynamic multiple choice single or multiple answer questions.
Required background knowledge: Linux, Docker, Python, Django, Flask, NodeJS, Databases
Place: ZB203 – Research Laboratory TelSiP
Supervisors:
Dr. Grigorios Koulouras, Associate Professor
Dr. Panagiotis Tsiakas, Lecturer
Student: Gerasimos Orlandatos
“Aero pendulum as an educational tool for PID controllers”
Assigned |
Brief Description:
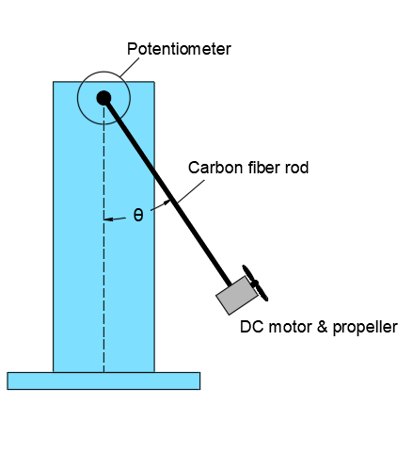
The goal of the tool is to teach and familiarize interested individuals with PID controllers. It involves the creation of a comprehensive educational package that will include: instructions for building a system (detailed list of components, files for 3D printing), code for the microcontroller to be used, and applications for remotely controlling the system. The system, which will have an arm connected to a fixed base via a joint and an electric motor and propeller at the other end, will perform a simple movement (like a pendulum) that can be controlled via PID. The code will be structured to send and receive encoded information and control the system securely.
Required background knowledge: Automatic Control, Basic Electronics, C/C++, Android Studio (Java), Unity (C#), PCB design (KiCAD), 3D design / printing
Place: ZB203 – Research Laboratory TelSiP
Supervisor: Dr. Panagiotis Tsiakas, Lecturer
Student: Grigorios Koutoulakis
“A leap of faith from Euclidean to Riemannian Manifolds for computer vision applications”
Brief Description:
This thesis extends some well-known Euclidean unsupervised learning algorithms onto the space of curved Riemannian manifolds. Following a comprehensive mathematical framework that formulates the aggregation problem of such manifold data, we will provide Region Covariance Descriptors that reside on the manifold of Symmetric Positive Definite matrices. Applications will include several visual classification tasks.
Required background knowledge: Linear Algebra, Computer Vision, Pattern Recognition, Image Processing, Computational Intelligence, Matlab, Python
Place: ZB203 – Research Laboratory TelSiP
Supervisor: Dr. Elias Zois, Associate Professor
Student: Nikolaos Vassilakis
“Generation of Synthetic samples for biometric authentication applications in the symmetric positive definite matrices”

Assigned |
Brief Description:
This thesis is all about study, describe & apply synthetic data generation techniques with applications to biometric identification.
Required background knowledge: Linear Algebra, Computer Vision, Pattern Recognition, Image Processing, Computational Intelligence, Matlab, Python
Place: ZB203 – Research Laboratory TelSiP
Supervisor: Dr. Elias Zois, Associate Professor
Student: Aikaterini Dimitropoulou
“Application of Computer Vision methods for the analysis of the content of satellite images”
Assigned |
Brief Description:
The purpose of this thesis is to investigate the way that we can improve satellite imagery through the use of super-resolution techniques. By doing so, we can enhance object detection algorithm performance. Specifically, the thesis aims to go beyond the native resolution of satellite imagery to identify various types of boats with greater accuracy. We’re excited to study and integrate several Machine/Deep Learning methods into a unified framework for the rapid detection of objects in large satellite images.
Required background knowledge: Computer Vision, Pattern Recognition, Image Processing, Computational Intelligence, Matlab, Python
Place: ZB203 – Research Laboratory TelSiP
Supervisor: Dr. Elias Zois, Associate Professor
Student: Stella Velesiotou
“Supervised and Unsupervised methods in Machine Learning and Computer Vision using data-driven Log-Determinant Divergences in the manifold space of symmetric and positive definite covariance matrices”
Assigned |
Brief Description:
Symmetric Positive Definite (SPD) matrices are commonly used in visual learning applications due to their ability to capture rich second-order statistics of visual data. A number of similarity measures exist for comparing SPD matrices. The selection of the appropriate measure for a given problem remains a challenge and often requires a trial-and-error process. This thesis addresses how to learn a similarity measure in a data-driven context by using the apha-beta meta-log-divergence. The divergence learning problem is combined with a number of supervised and unsupervised tasks in Machine Learning and Computer Vision.
Required background knowledge: Computer Vision, Pattern Recognition, Image Processing, Computational Intelligence, Matlab, Python
Place: ZB203 – Research Laboratory TelSiP
Supervisor: Dr. Elias Zois, Associate Professor
Student: Evangelos Mitikas
“Transformers for Computer Vision and Pattern Recognition”
Available |
Brief Description:
Transformers have recently emerged as a promising and versatile deep neural architecture. Since the introduction of Vision Transformers (ViT) in 2020, the Computer Vision & Pattern Recognition community has witnessed an explosion of Transformer-based Computer Vision models. This thesis presents an opportunity and at the same time a challenge to explore the various relevant topologies and open challenges in designing transformer models for Computer Vision.
Required background knowledge: Computer Vision, Pattern Recognition, Image Processing, Computational Intelligence, Matlab, Python
Place: ZB203 – Research Laboratory TelSiP
Supervisor: Dr. Elias Zois, Associate Professor
Student: –
“Geometric-constrained methods for dimensionality reduction in the manifold space of symmetric and positive definite covariance matrices. Applications in Machine Learning and Computer Vision.”
Available |
Brief Description:
The task of visual recognition in the space of the Riemannian geometry with the use of Symmetric Positive Definite (SPD) matrices, provides high discriminative power. Still, the use of a high-dimensional Riemannian manifold of SPD matrices, becomes computationally expensive. This thesis aims to methods and algorithms which will map the high-dimensional SPD matrices by mapping to low-dimensional ones with the use of an orthonormal transformation. This manifold oriented dimensionality reduction is achieved in both supervised and unsupervised scenarios. It all comes to an optimization problem on a Grassmann manifold; Its evaluation on Computer Vision tasks shows that this approach results towards an enhanced accuracy, which can be compared to state-of-the-art methods.
Required background knowledge: Linear Algebra, Computer Vision, Pattern Recognition, Image Processing, Computational Intelligence, Matlab, Python, GPU Computing
Place: ZB203 – Research Laboratory TelSiP
Supervisor: Dr. Elias Zois, Associate Professor
Student: –
“Modeling and development of a nonlinear control system for unmanned aerial vehicles”

Available |
Brief Description:
Unmanned aerial vehicles (UAVs) are vehicles that do not carry a human pilot, rather their navigation is achieved either via remote control or automatically by a computer. One of the most popular UAV categories are quadcopters, which consist of four motors placed upon the edges of a chassis resembling a cross shape.
Automatic control of quadcopters is a challenging task, due to a variety of reasons, like for example the highly nonlinear, unstable and underactuated nature of the system and the fact that it is a Multiple-Input Multiple-Output (MIMO) system with strongly correlated terms. The objective of this diploma thesis is the development of a nonlinear control methodology based on sliding mode control (SMC) with the aim of applying it on an actual quadcopter platform.
Indicative Publications:
[1] Tripathi, V., Behera, L., Vermal, N., “Design of sliding mode and backstepping controllers for a quadcopter”, 39th National Systems Conference (NSC), 2015.
[2] Madani, T., Benallegue, A., “Backstepping Control for a Quadrotor Helicopter”, 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2006.
Required background knowledge: Linear control theory (PID and state feedback controllers), State-space system modeling, Linear algebra, MATLAB programming
Knowledge to be acquired: Nonlinear control theory, Stability of dynamic systems, Lyapunov theory
Place: A109b – Research Laboratory TelSiP
Supervisor: Dr. Alex Alexandridis, Professor
Student: –
“Development of algorithms in Python programming environment for the operation of unmanned aerial vehicles”
Available |
Brief Description:
Unmanned aerial vehicles (UAVs) are vehicles that do not carry a human pilot, rather their navigation is achieved either via remote control or automatically by a computer. One of the most popular UAV categories are quadcopters, which consist of four motors placed upon the edges of a chassis resembling a cross shape.
Operation of an autonomous UAV system requires the cooperation and execution in real-time of proper algorithms that are responsible for implementing specific procedures, like for example the estimation of the system orientation (roll-pitch-yaw angles), processing of the measurements collected by the onboard sensors etc. The objective of this diploma thesis is the development of algorithms in the Python programming language with the aim of testing them in a real quadcopter platform. The developed algorithms will used for estimating the orientation (complementary filter, extended Kalman filter, mahony orientation filter etc.), processing of the sensor measurements (lowpass filters, analog filters, digital filters) along with certain control algorithms, like for instance a PID controller.
Indicative Publications:
[1] Tellex, S., Brown, A., & Lupashin, S. (2018). Estimation for Quadrotors. arXiv preprint arXiv:1809.00037.
Required background knowledge: Object-oriented programming, Linear algebra, Basic python programming, Basic familiarity with Linux-like operating systems
Knowledge to be acquired: Development of optimized and advanced algorithms with application in embedded systems, Deep knowledge of object-oriented programming and of Python programming language, Familiarity with version control software (git)
Place: A109b – Research Laboratory TelSiP
Supervisor: Dr. Alex Alexandridis, Professor
Student: –
“Development of algorithms in C++ programming environment for the operation of unmanned aerial vehicles”
Available |
Brief Description:
Unmanned aerial vehicles (UAVs) are vehicles that do not carry a human pilot, rather their navigation is achieved either via remote control or automatically by a computer. One of the most popular UAV categories are quadcopters, which consist of four motors placed upon the edges of a chassis resembling a cross shape.
Operation of an autonomous UAV system requires the cooperation and execution in real-time of proper algorithms that are responsible for implementing specific procedures, like for example the estimation of the system orientation (roll-pitch-yaw angles), processing of the measurements collected by the onboard sensors etc. The objective of this diploma thesis is the development of algorithms in the C++ programming language with the aim of testing them in a real quadcopter platform. The developed algorithms will used for estimating the orientation (complementary filter, extended Kalman filter, mahony orientation filter etc.), processing of the sensor measurements (lowpass filters, analog filters, digital filters) along with certain control algorithms, like for instance a PID controller.
Indicative Publications:
[1] Tellex, S., Brown, A., & Lupashin, S. (2018). Estimation for Quadrotors. arXiv preprint arXiv:1809.00037.
Required background knowledge: Object-oriented programming, Linear algebra, Basic C++ programming (data types, pointers), Basic familiarity with Linux-like operating systems
Knowledge to be acquired: Development of optimized and advanced algorithms with application in embedded systems, Deep knowledge of object-oriented programming and of C++ programming language, Familiarity with version control software (git)
Place: A109b – Research Laboratory TelSiP
Supervisor: Dr. Alex Alexandridis, Professor
Student: –
“Development of sensor drivers for autonomous unmanned vehicles”
Available |
Brief Description:
Autonomous operation of unmanned vehicles (aerial, underground, surface) requires measurements collected by sensors in real-time that are placed on the electronic “brain” unit (board) of the vehicle. One of the most important sensors is the Inertial Measurement Unit (IMU) that consists of a triaxial gyroscope and a triaxial accelerometer (6 Degrees of Freedom IMU) and in many cases of a triaxial digital compass (magnetometer) (9 Degrees of Freedom IMU), as well. Gyroscope usage allows the measurement of the vehicle angular velocities along the 3 movement axes, the accelerometer is utilized to measure the linear accelerations with respect to earth’s gravitational acceleration and the magnetometer measures the absolute heading of the vehicle.
The objective of this diploma thesis is the development of the communication driver in the Python programming language for the IMU LSM9DS1 sensor with the Navio2 electronic board. More specifically, the aim is to develop code that will allow for the reading of the sensor board registers in order to be capable of acquiring its measurements in real-time. A basic goal of the thesis is to apply the developed algorithm in a real quadcopter vehicle that is equipped with the aforementioned IMU sensor and the Navio2 electronic board.
Indicative Links:
[1] https://www.st.com/resource/en/datasheet/lsm9ds1.pdf
[2] https://docs.emlid.com/navio2/
Required background knowledge: Python programming, Basic familiarity with embedded systems (hexadecimal system, registers, register memory addresses)
Knowledge to be acquired: Development of drivers for sensors – electronic boards communication, advanced knowledge of embedded systems programming, Familiarity with version control software (git)
Place: A109b – Research Laboratory TelSiP
Supervisor: Dr. Alex Alexandridis, Professor
Student: –
“Development of a wireless communication framework for an unmanned aerial vehicle in the Robot Operating System (ROS) environment”
Available |
Brief Description:
Unmanned aerial vehicles (UAVs) are vehicles that do not carry a human pilot, rather their navigation is achieved either via remote control or automatically by a computer. One of the most popular UAV categories are quadcopters, which consist of four motors placed upon the edges of a chassis resembling a cross shape.
The objective of this diploma thesis is the development of framework that will allow the wireless communication in real-time between a quadcopter vehicle and a computer that will be placed on the ground. The purpose is to receive and send signals between the two communication nodes (quadcopter – ground computer) that will include, for example, sensor measurements or the signal values that need to be implemented at each time instant by the vehicle motors. A basic goal of the thesis is to apply the developed communication framework in a real quadcopter system.
The code that will be developed and executed onboard the quadcopter microcomputer can be implemented either in Python or C++, while the code that will be executed on the ground computer can be written in Python, C++ or MATLAB. In all cases, the developed code will be written by utilizing the Robot Operating System (ROS) libraries that are open-source.
Indicative Links:
[2] https://www.mathworks.com/help/ros/ug/get-started-with-ros.html
Required background knowledge: Object-oriented programming, Programming skills in C++/Python/MATLAB
Knowledge to be acquired: Usage of the widely known robot programming framework ROS, Advanced object-oriented programming, Familiarity with version control software (git)
Place: A109b – Research Laboratory TelSiP
Supervisor: Dr. Alex Alexandridis, Professor
Student: –
“Neural network training using GPGPUs”
Available |
Brief Description:
Training deep learning-based models like artificial neural networks (ANNs) requires a great computational cost and is often very time consuming. The objective of this diploma thesis is to develop and ANN training algorithm using GPUs and the CUDA platform [1] and compare them to implementations using standard CPUs. An example of case studies that will be implemented involves ANN architectures with a large number of connections like Convolutional Neural Networks (CNNs) [2].
Indicative Publications:
[1] L. Oden, “Lessons learned from comparing C-CUDA and Python-Numba for GPU-Computing,” Proc. – 2020 28th Euromicro Int. Conf. Parallel, Distrib. Network-Based Process. PDP 2020, pp. 216–223, Mar. 2020, doi: 10.1109/PDP50117.2020.00041.
[2] J. Pendlebury, H. Xiong, and R. Walshe, “Artificial neural network simulation on CUDA,” Proc. – IEEE Int. Symp. Distrib. Simul. Real-Time Appl. DS-RT, pp. 228–233, 2012, doi: 10.1109/DS-RT.2012.40.
Required background knowledge: Computational Intelligence, Programming skills in Python, Linear Algebra
Knowledge to be acquired: Usage of the widely known robot programming framework ROS, Advanced object-oriented programming, Familiarity with version control software (git)
Place: A109b – Research Laboratory TelSiP
Supervisor: Dr. Alex Alexandridis, Professor
Student: –