“Η διαμόρφωση chirp ολίσθησης συχνότητας (FSCM)”
Διπλωματικές Εργασίες Ακαδημαϊκού Έτους 2023-2024

Available |
Σύντομη Περιγραφή:
Τα Χαμηλής Ισχύος Δίκτυα Ευρείας Περιοχής (LPWAN) καλούνται να καλύψουν τις ανάγκες συνδεσιμότητας στον τομέα του Διαδικτύου των Πραγμάτων (IoT). Στην κατεύθυνση αυτή το σύστημα LoRaWAN υιοθετεί, για το φυσικό επίπεδο LoRa, την διαμόρφωση FSCM. Στόχος της προτεινόμενης διπλωματικής εργασίας είναι η ανάλυση και μελέτη της διαμόρφωσης/αποδιαμόρφωσης LoRa. Η επίδοση της FSCM, όσον αφορά AWGN και επιλεκτικά ως προς τη συχνότητα κανάλια, θα αποτιμηθεί μέσω εξομοιώσεων χρησιμοποιώντας την πλατφόρμα Matlab.
Απαραίτητες γνώσεις: Ψηφιακή Επεξεργασία Σήματος, Ευρυζωνικές Επικοινωνίες, Σχεδίαση Τηλεπικοινωνιακών Συστημάτων, MATLAB, C/C++, Python
Χώρος υλοποίησης της διπλωματικής: ZB203 – Ερευνητικό Εργαστήριο TelSiP
Επιβλέπων: Δρ. Ευάγγελος Ζέρβας, Καθηγητής
Φοιτητής: –
“Έξυπνη παρακολούθηση και διαχείριση ενέργειας με βάση την τεχνολογία του Διαδικτύου των Πραγμάτων σε αυτόνομες (off-grid) οικίες”

Σύντομη Περιγραφή:
Η κλιματική αλλαγή αποτελεί μία από τις σημαντικότερες προκλήσεις που αντιμετωπίζει ο πλανήτης μας σήμερα. Οι εκπομπές αερίων του θερμοκηπίου από την καύση ορυκτών καυσίμων, οδηγούν σταδιακά σε αύξηση της μέσης τιμής θερμοκρασίας του πλανήτη, λιώσιμο των πάγων στους πόλους, αύξηση της στάθμης της θάλασσας και σε άλλες καταστροφικές επιπτώσεις. Για να αντιμετωπιστεί αυτή η πρόκληση, πρέπει να γίνει κατάλληλη διαχείριση της ενεργειακής παραγωγής και κατανάλωσης. Τα αυτόνομα σπίτια που δεν είναι συνδεδεμένα σε σταθερό δημόσιο δίκτυο ηλεκτροδότησης, χρησιμοποιούν κυρίως φωτοβολταϊκά συστήματα με μπαταρίες και αποτελούν μια σημαντική λύση σε αυτήν την πρόκληση. Τα φωτοβολταϊκά πάνελ εκμεταλλεύονται την ηλιακή ενέργεια για την παραγωγή ηλεκτρικής ενέργειας, μειώνοντας την ανάγκη για την χρήση ορυκτών καυσίμων. Αυτό έχει αρκετά θετικά αποτελέσματα, όπως είναι η μείωση των εκπομπών CO2, αυξημένη ενεργειακή ανεξαρτησία των καταναλωτών, αποκεντρωμένη παραγωγή ενέργειας, μειωμένη ανάγκη γραμμών μεταφοράς ηλεκτρικής ενέργειας, χαμηλό κόστος συντήρησης της εγκατάστασης κτλ. Η δημιουργία όλο και περισσότερων αυτόνομων κατοικιών, που χρησιμοποιούν φωτοβολταϊκά συστήματα με μπαταρίες, είναι σημαντική για τη μείωση των αρνητικών επιπτώσεων της κλιματικής αλλαγής και τη δημιουργία μιας πιο βιώσιμης κοινωνίας.
Σε αυτό το πλαίσιο η συγκεκριμένη Διπλωματική Εργασία, εστιάζει στον τρόπο που πρέπει να γίνει μια σωστή διαστασιολόγηση τέτοιων συστημάτων, καθώς και σε μεθόδους βελτίωσης της χρήσης της παραγόμενης και αποθηκευμένης ενέργειας. Για να επιτευχθεί η έξυπνη διαχείριση της ηλεκτρικής ενέργειας, είναι απαραίτητη η επιτήρηση της παραγόμενης και καταναλισκόμενης ενέργειας με την χρήση έξυπνων μετρητών. Η συλλογή των δεδομένων της παραγόμενης, της αποθηκευμένης και της καταναλισκόμενης ηλεκτρικής ενέργειας θα αποθηκεύονται σε βάσεις δεδομένων χρονοσειρών (TSDB – Time Series DataBases), ενώ θα πραγματοποιείται κατάλληλη επεξεργασία σε πραγματικό χρόνο προκειμένου να επιτευχθεί βελτιστοποίηση της απόδοσης του συστήματος. Επιπλέον, θα υλοποιηθούν γραφήματα που θα απεικονίζουν σε πραγματικό χρόνο και θα ειδοποιούν τον χρήστη για την παραγόμενη και καταναλισκόμενη ενέργεια της οικίας του. Τέλος, θα γίνει μια προσπάθεια αποτίμησης της συμβολής της χρήσης εργαλείων και τεχνολογιών όπως το Διαδίκτυο των Πραγμάτων και η Υπολογιστική Νέφους, στο να βελτιωθεί η ενεργειακή απόδοση μιας αυτόνομης οικίας.
Απαραίτητες γνώσεις: Φωτοβολταϊκά Συστήματα, Ενσωματωμένα Συστήματα, RPi, Διαδίκτυο των Πραγμάτων, Νεφοϋπολογιστική, Docker, InfluxDB, Grafana, Telegraf, MQTT, ML, Python
Χώρος υλοποίησης της διπλωματικής: ZB203 – Ερευνητικό Εργαστήριο TelSiP
Επιβλέπων: Δρ. Γρηγόριος Κουλούρας, Αναπληρωτής Καθηγητής
Φοιτητής: Απόστολος Κλής
“Σχεδιασμός και υλοποίηση διαδικτυακής εφαρμογής για την κατηγοριοποίηση όγκων του μαστού με χρήση Συνελικτικών Νευρωνικών Δικτύων”
Σύντομη Περιγραφή:
Η ραγδαία εξέλιξη της τεχνητής νοημοσύνης, σε συνδυασμό με την αύξηση της ταχύτητας των υπολογιστικών συστημάτων, καθώς και της ακρίβειας των μοντέλων μηχανικής μάθησης, έχουν ωφελήσει αρκετούς τομείς, ένας εκ των οποίων είναι και αυτός της ιατρικής και βιοϊατρικής τεχνολογίας. Συγκεκριμένα, η αναγνώριση εικόνων και προτύπων μέσω της βαθιάς μάθησης και η εκπαίδευση των Νευρωνικών Δικτύων με μεγάλο όγκο δεδομένων έχουν φέρει επαναστατικές αλλαγές στην αναγνώριση και κατηγοριοποίηση ασθενειών κάθε είδους. Η ικανότητα των Νευρωνικών Δικτύων να αναγνωρίζουν πρότυπα και να κάνουν κατηγοριοποιήσεις συχνά μπορεί να ξεπερνάει την ανθρώπινη ακρίβεια, επιτρέποντας με αυτόν τον τρόπο την προτεραιοποίηση σοβαρών περιστατικών ή ακόμα και την αντιμετώπιση περίπλοκων ιατρικών προκλήσεων.
Στα πλαίσια της Διπλωματικής Εργασίας θα αναπτυχθεί ένα μοντέλο τεχνητής νοημοσύνης χρησιμοποιώντας Συνελικτικά Νευρωνικά Δίκτυα (Convolutional Neural Networks – CNNs) για την αναγνώριση όγκων από υπέρηχους στον μαστό και την ταξινόμηση αυτών ως καλοήθεις ή κακοήθεις με τη βοήθεια των βιβλιοθηκών Tensorflow και Keras. Επιπλέον, θα υλοποιηθεί μια διαδικτυακή εφαρμογή, με Python και ReactJS που θα δίνει έμφαση στο user experience και θα επιτρέπει την ευκολότερη πρόσβαση και χρήση από τον καθένα. Η αυτονομία που θα προσφέρει η διαδικτυακή εφαρμογή συνδυάζεται με τη δυνατότητα αλληλεπίδρασης και μέσω κινητών τηλεφώνων, παρέχοντας ολοκληρωμένη λύση για την άμεση ανίχνευση και προσφέροντας τελικά ένα πολύτιμο εργαλείο για τη διάγνωση και παρακολούθηση των παθήσεων του μαστού.
Απαραίτητες γνώσεις: Machine Learning, Neural Networks, Python, Keras, TensorFlow, Flask, ReactJS, HTML, CSS, Cloud Computing
Χώρος υλοποίησης της διπλωματικής: ZB203 – Ερευνητικό Εργαστήριο TelSiP
Επιβλέπων: Δρ. Γρηγόριος Κουλούρας, Αναπληρωτής Καθηγητής
Φοιτητής: Χριστόφορος Κόρμπος
“Διαδικτυακή πλατφόρμα για υπηρεσίες διαμοιρασμού οχημάτων μικροκινητικότητας”

Assigned |
Σύντομη Περιγραφή:
Καθώς ο χαρακτήρας των σημερινών αστικών συγκοινωνιών στις περισσότερες πόλεις του κόσμου είναι εμφανώς μη βιώσιμος, γίνονται συντονισμένες προσπάθειες από τα ανεπτυγμένα κράτη, ώστε ο τομέας της κινητικότητας να προσανατολιστεί στην βιώσιμη ανάπτυξη. Στην χώρα μας πρόσφατα έχει θεσπιστεί νόμος για τη Βιώσιμη Αστική Κινητικότητα – Μικροκινητικότητα (4784/2021) που περιγράφει αναλυτικά αυτό το μοντέλο. Οι σύγχρονες μορφές κινητικότητας – μικροκινητικότητας είναι πιο φιλικές προς το περιβάλλον, αφού μειώνουν αισθητά τις εκπομπές καυσαερίων στην ατμόσφαιρα, αλλά και την κυκλοφοριακή συμφόρηση στις πόλεις. Σε αυτές εντάσσεται η ηλεκτροκίνηση και οι διαμοιραζόμενες μεταφορές. Ο σύγχρονος όρος μικροκινητικότητα περιγράφει τις επιλογές μετακίνησης των πολιτών για αποστάσεις μικρής κλίμακας. Στις σύγχρονες πόλεις οι υπηρεσίες διαμοιρασμού μέσων μικροκινητικότητας, αυξάνονται με γρήγορους ρυθμούς, αυξάνοντας έτσι και τις επιλογές των χρηστών.
Σκοπός της Διπλωματικής Εργασίας είναι η κατανόηση της σημασίας της βιώσιμης αστικής μικροκινητικότητας και σε αυτή την κατεύθυνση θα γίνει μια προσπάθεια να συμβάλει ουσιαστικά για την ανάπτυξή της. Έτσι, στα πλαίσια της Διπλωματικής Εργασίας, θα σχεδιαστεί και θα υλοποιηθεί ένα ολοκληρωμένο σύστημα και μια εφαρμογή WebApp, για την παρακολούθηση και την διαχείριση στόλου οχημάτων μικροκινητικότητας.
Η Διπλωματική Εργασία θα χωριστεί σε τρία μέρη. Στο πρώτο μέρος της, θα σχεδιαστεί πρωτότυπο σύστημα υλικού (hardware), που θα ενσωματώνεται σε κάθε όχημα μικροκινητικότητας και θα χρησιμοποιεί σύγχρονες τεχνολογίες IoT (π.χ. LoRaWAN) για την επικοινωνία με την πλατφόρμα. Έμφαση θα δοθεί στην αξιοπιστία και στην ασφάλεια της επικοινωνίας. Στο δεύτερο μέρος θα υλοποιηθεί η ανάπτυξη διαδικτυακής πλατφόρμας διαχείρισης και διαμοιρασμού οχημάτων μικροκινητικότητας. Σε αυτό το σημείο ο φοιτητής θα μελετήσει και θα υλοποιήσει αλγόριθμους όπου απαιτείται. Για παράδειγμα αν διαμοιράζονται ηλεκτρικά πατίνια, υπάρχει η ανάγκη για την εύρεση βέλτιστων διαδρομών για την συλλογή και την επαναφόρτιση των μπαταριών τους. Σε αυτή την περίπτωση, θα μελετηθούν αλγόριθμοι βελτιστοποίησης, όπως είναι το γνωστό πρόβλημα του πλανόδιου πωλητή (TSP – Travelling Salesman Problem). Τέλος, στο τρίτο μέρος, θα γίνουν δοκιμές και έλεγχος της καλής λειτουργίας του ολοκληρωμένου συστήματος.
Απαραίτητες γνώσεις: IoT, LoRaWAN, MQTT, Linux, Docker, Python, Django, Flask, NodeJS, Databases
Χώρος υλοποίησης της διπλωματικής: ZB203 – Ερευνητικό Εργαστήριο TelSiP
Επιβλέποντες:
Δρ. Γρηγόριος Κουλούρας, Αναπληρωτής Καθηγητής
Δρ. Παναγιώτης Τσιάκας, Λέκτορας
Φοιτήτρια: Αγγελική Παχωπού
“Διαδραστική πλατφόρμα εκμάθησης της τεχνολογίας Docker”
Assigned |
Σύντομη Περιγραφή:
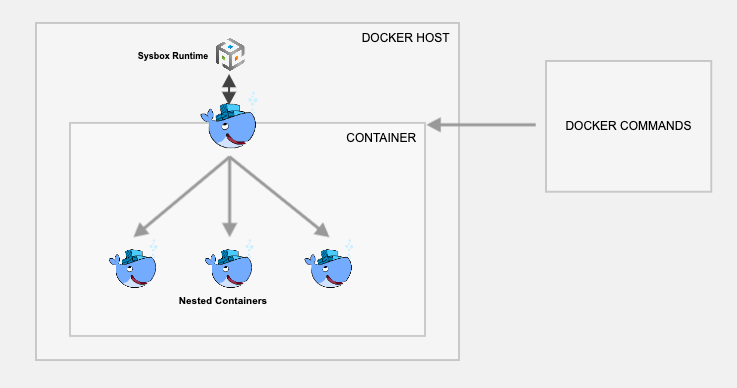
Η αρχιτεκτονική υλοποίησης εφαρμογών με μικροϋπηρεσίες (microservices), έχουν αντικαταστήσει σε πολύ μεγάλο βαθμό, τόσο τη μονολιθική αρχιτεκτονική (monolithic architecture), όσο και την Αρχιτεκτονική υλοποιημένη με υπηρεσίες ή αλλιώς Service-Oriented Architecture (SOA). Στο σύγχρονο κόσμο της πληροφορικής αναπτύσσονται τεχνολογίες απομόνωσης των μικροϋπηρεσιών σε Containers, όπως είναι το Docker.
Σκοπός της Διπλωματικής Εργασίας είναι ο σχεδιασμός και η υλοποίηση διαδραστικής πλατφόρμας για την εκπαίδευση των μελλοντικών προγραμματιστών που ενδιαφέρονται για την ανάπτυξη μικροϋπηρεσιών με την τεχνολογία Docker. Για την επίτευξη του στόχου αυτού, θα χρησιμοποιηθεί κάποιο Framework της Python (π.χ. Django ή Flask) για την ανάπτυξη διαδικτυακής εφαρμογής online διαδραστικών μαθημάτων. Στη σελίδα της διαδικτυακής εφαρμογής θα ενσωματώνεται ένα web «terminal» (cli – command line interface) σε bash shell όπου ο εκπαιδευόμενος θα έχει την δυνατότητα να πειραματιστεί με τις εντολές της τεχνολογίας docker. Στο τέλος του κάθε ενότητας, καθώς και στο τέλος ολόκληρου του μαθήματος, θα υπάρχουν διαδραστικές ερωτήσεις εμπέδωσης για την αξιολόγηση του εκπαιδευόμενου, με την μορφή δυναμικών ερωτήσεων πολλαπλής επιλογής μοναδικής ή πολλαπλής απάντησης.
Απαραίτητες γνώσεις: Linux, Docker, Python, Django, Flask, NodeJS, Databases
Χώρος υλοποίησης της διπλωματικής: ZB203 – Ερευνητικό Εργαστήριο TelSiP
Επιβλέποντες:
Δρ. Γρηγόριος Κουλούρας, Αναπληρωτής Καθηγητής
Δρ. Παναγιώτης Τσιάκας, Λέκτορας
Φοιτητής: Γεράσιμος Ορλανδάτος
“Ελικοφόρο εκκρεμές ως εκπαιδευτικό εργαλείο για PID ελεγκτές”
Assigned |
Σύντομη Περιγραφή:
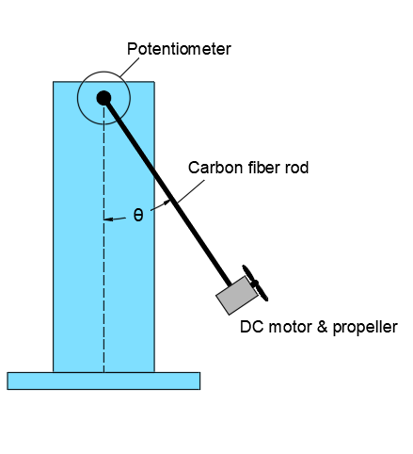
Στόχος του εργαλείου είναι η εκμάθηση και εξοικείωση με τους PID ελεγκτές από άτομα που ενδιαφέρονται για το θέμα. Πρόκειται για τη δημιουργία ενός ολοκληρωμένου εκπαιδευτικού πακέτου που θα περιλαμβάνει: οδηγίες για την κατασκευή ενός συστήματος (αναλυτική λίστα εξαρτημάτων, αρχεία για 3D εκτύπωση), κώδικα για τον μικροελεγκτή που θα χρησιμοποιηθεί και εφαρμογές για τον έλεγχο του συστήματος απομακρυσμένα. Το σύστημα, το οποίο θα διαθέτει έναν βραχίονα συνδεδεμένο σε σταθερή βάση μέσω άρθρωσης και στην άλλη άκρη του θα φέρει ηλεκτρικό κινητήρα και έλικα, θα πραγματοποιεί μια απλή κίνηση (όπως ένα εκκρεμές) που θα μπορεί να ελεγχθεί μέσω PID. Ο κώδικας θα είναι έτσι δομημένος ώστε να αποστέλλει και να λαμβάνει κωδικοποιημένη πληροφορία και να ελέγχει το σύστημα με ασφάλεια.
Απαραίτητες γνώσεις: Συστήματα Αυτομάτου Ελέγχου, Βασικά Ηλεκτρονικά, C/C++, Android Studio (Java), Unity (C#), Σχεδιασμός PCB (KiCAD), 3D Σχεδίαση / Eκτύπωση
Χώρος υλοποίησης της διπλωματικής: ZB203 – Ερευνητικό Εργαστήριο TelSiP
Επιβλέπων: Δρ. Παναγιώτης Τσιάκας, Λέκτορας
Φοιτητής: Γρηγόριος Κουτουλάκης
“Από τον Ευκλείδη στον Riemann: Ένα άλμα στην υπολογιστική όραση σε γεωμετρικούς χώρους”
Σύντομη Περιγραφή:
Στην παρούσα διπλωματική/πτυχιακή εργασία θα ασχοληθούμε με τεχνικές μη επιβλεπόμενης μάθησης σε εφαρμογές υπολογιστικής όρασης και μηχανικής μάθησης σε Riemannian γεωμετρικούς χώρους. Ειδικότερα, θα ασχοληθούμε με την χρήση τεχνικών ομαδοποίησης σε χώρους SPD και θα εφαρμόσουμε την βασική θεωρία σε διάφορα προβλήματα υπολογιστικής όρασης.
Απαραίτητες γνώσεις: Γραμμική Άλγεβρα, Υπολογιστική Όραση, Επεξεργασία Εικόνας, Υπολογιστική Νοημοσύνη, Matlab, Python
Χώρος υλοποίησης της διπλωματικής: ZB203 – Ερευνητικό Εργαστήριο TelSiP
Επιβλέπων: Δρ. Ηλίας Ζώης, Αναπληρωτής Καθηγητής
Φοιτητής: Νικόλαος Βασιλάκης
“Τεχνικές δημιουργίας συνθετικών δεδομένων για βιομετρικές εφαρμογές στον χώρο των συμμετρικών θετικών οριζόμενων πινάκων”

Assigned |
Σύντομη Περιγραφή:
Η παρούσα Διπλωματική Εργασία σχετίζεται με την μελέτη, περιγραφή και εφαρμογή τεχνικών δημιουργίας συνθετικών δεδομένων με εφαρμογές στην βιομετρική ταυτοποίηση.
Απαραίτητες γνώσεις: Γραμμική Άλγεβρα, Υπολογιστική Όραση, Επεξεργασία Εικόνας, Υπολογιστική Νοημοσύνη, Matlab, Python
Χώρος υλοποίησης της διπλωματικής: ZB203 – Ερευνητικό Εργαστήριο TelSiP
Επιβλέπων: Δρ. Ηλίας Ζώης, Αναπληρωτής Καθηγητής
Φοιτήτρια: Αικατερίνη Δημητροπούλου
“Εφαρμογή μεθόδων Υπολογιστικής Όρασης στην ανάλυση του περιεχομένου δορυφορικών εικόνων”
Assigned |
Σύντομη Περιγραφή:
Σκοπός της παρούσας Διπλωματικής Εργασίας είναι η διερεύνηση του τρόπου με τον οποίο μπορούμε να βελτιώσουμε τις δορυφορικές εικόνες μέσω της χρήσης τεχνικών υπερ-ανάλυσης με σκοπό να βελτιώσουμε την απόδοση ενός αλγορίθμου ανίχνευσης αντικειμένων μέσα σε αυτές. Συγκεκριμένα, η παρούσα Διπλωματική Εργασία στοχεύει να υπερβεί την υπάρχουσα ανάλυση των δορυφορικών εικόνων για να βοηθήσει σε αλγορίθμους εντοπισμού διαφόρων τύπων σκαφών με μεγαλύτερη ακρίβεια. Στα πλαίσια αυτά, θα μελετηθούν και θα ενσωματωθούν διάφορες μέθοδοι Μηχανικής/Βαθιάς Μάθησης σε ένα ενοποιημένο πλαίσιο για την ταχεία ανίχνευση αντικειμένων σε μεγάλες δορυφορικές εικόνες.
Απαραίτητες γνώσεις: Υπολογιστική Όραση, Επεξεργασία Εικόνας, Υπολογιστική Νοημοσύνη, Matlab, Python
Χώρος υλοποίησης της διπλωματικής: ZB203 – Ερευνητικό Εργαστήριο TelSiP
Επιβλέπων: Δρ. Ηλίας Ζώης, Αναπληρωτής Καθηγητής
Φοιτήτρια: Στέλλα Βελεσιώτου
“Επιβλεπόμενες και μη επιβλεπόμενες μέθοδοι στην Μηχανική Μάθηση και την Υπολογιστική Όραση με χρήση οδηγούμενων από τα δεδομένα λογαριθμικών αποκλίσεων, σε χώρους πολλαπλότητας συμμετρικών και θετικά οριζόμενων πινάκων συνδιακύμανσης”
Assigned |
Σύντομη Περιγραφή:
Αναμφισβήτητα, οι αναπαραστάσεις των ψηφιακών εικόνων με τη μορφή συμμετρικών και θετικά οριζόμενων πινάκων συνδιακύμανσης (SPD) έχουν γίνει δημοφιλείς σε μια ποικιλία εφαρμογών υπολογιστικής όρασης εκμάθησης λόγω της αποδεδειγμένης ικανότητάς τους να καταγράφουν σε μεγάλο βαθμό τα στατιστικά δεύτερης τάξης των οπτικών δεδομένων. Στην βιβλιογραφία μπορούν να αναζητηθούν αρκετά μέτρα ομοιότητας για τη σύγκριση ζευγών πινάκων SPD με τεκμηριωμένα οφέλη. Ωστόσο, η επιλογή ενός κατάλληλου μέτρου παραμένει πρόκληση και στις περισσότερες περιπτώσεις είναι αποτέλεσμα μιας διαδικασίας δοκιμής και λάθους. Η παρούσα Διπλωματική Εργασία, θα ασχοληθεί με την διερεύνηση της εκμάθησης της ομοιότητας με την αξιοποίηση λογαριθμικών αποκλίσεων στον γεωμετρικό χώρο των συμμετρικών και θετικά οριζόμενων πινάκων συνδιακύμανσης και τις εφαρμογές τους, και την εφαρμογή τους τόσο σε επιβλεπόμενα όσο και σε μη επιβλεπόμενα προβλήματα Υπολογιστικής Όρασης.
Απαραίτητες γνώσεις: Υπολογιστική Όραση, Επεξεργασία Εικόνας, Υπολογιστική Νοημοσύνη, Matlab, Python
Χώρος υλοποίησης της διπλωματικής: ZB203 – Ερευνητικό Εργαστήριο TelSiP
Επιβλέπων: Δρ. Ηλίας Ζώης, Αναπληρωτής Καθηγητής
Φοιτητής: Ευάγγελος Μήτικας
“Οι «Mετασχηματιστές» ως εργαλείο στην Υπολογιστική Όραση και την Αναγνώριση Προτύπων”
Available |
Σύντομη Περιγραφή:
Οι Μετασχηματιστές (Tranformers) έχουν εμφανιστεί πρόσφατα ως μια πολλά υποσχόμενη και ευέλικτη βαθιά νευρωνική αρχιτεκτονική. Από την εισαγωγή των Vision Transformers (ViT) το 2020, η κοινότητα της Υπολογιστικής Όρασης και της αναγνώρισης προτύπων (Computer Vision & Pattern Recognition) έχει γίνει μάρτυρας μιας έκρηξης των μοντέλων υπολογιστικής όρασης που βασίζονται σε μετασχηματιστές. Αυτή η διπλωματική αποτελεί μια ευκαιρία και ταυτόχρονα πρόκληση για την διερεύνηση των διαφόρων σχετικών τοπολογιών και των ανοιχτών προκλήσεων στο σχεδιασμό μοντέλων μετασχηματιστών για την υπολογιστική όραση.
Απαραίτητες γνώσεις: Υπολογιστική Όραση, Επεξεργασία Εικόνας, Υπολογιστική Νοημοσύνη, Matlab, Python
Χώρος υλοποίησης της διπλωματικής: ZB203 – Ερευνητικό Εργαστήριο TelSiP
Επιβλέπων: Δρ. Ηλίας Ζώης, Αναπληρωτής Καθηγητής
Φοιτητής: –
“Γεωμετρικά εμπνεόμενες μέθοδοι για την ελάττωση των διαστάσεων σε χώρους πολλαπλότητας συμμετρικών και θετικά οριζόμενων πινάκων συνδιακύμανσης. Εφαρμογές στην Μηχανική Μάθηση και την Υπολογιστική Όραση”
Available |
Σύντομη Περιγραφή:
H αναπαράσταση εικόνων με την χρήση των συμμετρικών και θετικά οριζόμενων πινάκων συνδιακύμανσης (SPD), δηλαδή λαμβάνοντας υπόψη τη γεωμετρία Riemann του χώρου, φαίνεται να αποδίδει σε διάφορα αντικείμενα Υπολογιστικής Όρασης. Από την άλλη, η χρήση μεγάλων διαστάσεων στις πολλαπλότητες SPD εισάγει υψηλό υπολογιστικό κόστος το οποίο περιορίζει τη δυνατότητα εφαρμογής των υπαρχουσών SPD τεχνικών. Στην παρούσα Διπλωματική Εργασία, θα μελετηθούν αλγόριθμοι ικανοί να χειρίζονται πίνακες SPD υψηλών διαστάσεων διαμέσου μια αναπαράστασης σε πίνακες SPD χαμηλότερων διαστάσεων. Για το σκοπό αυτό θα γίνει χρήση ορθοκανονικών προβολών ώστε να μετατραπούν χώροι SPD υψηλής διάστασης σε αντίστοιχους SPD χαμηλής διάστασης. Έτσι, η μείωση των διαστάσεων διατυπώνεται ως το πρόβλημα της εύρεσης μιας προβολής η οποία δημιουργεί ένα SPD χώρο χαμηλής διάστασης είτε με βέλτιστη απόδοση στον διαχωρισμό (εποπτευόμενο σενάριο) είτε με μέγιστη διακύμανση των δεδομένων (μη εποπτευόμενο σενάριο). Η διαδικασία της μάθησης εκφράζεται ως πρόβλημα βελτιστοποίησης σε μια πολλαπλότητα Grassmann. Η αξιολόγησή της σε εργασίες Υπολογιστικής Όρασης παρέχει ισχυρές ενδείξεις ότι η συγκεκριμένη προσέγγιση οδηγεί σε σημαντικό κέρδος ακρίβειας έναντι άλλων μεθόδων αιχμής.
Απαραίτητες γνώσεις: Γραμμική Άλγεβρα, Υπολογιστική Όραση, Επεξεργασία Εικόνας, Υπολογιστική Νοημοσύνη, Matlab, Python, GPU Computing
Χώρος υλοποίησης της διπλωματικής: ZB203 – Ερευνητικό Εργαστήριο TelSiP
Επιβλέπων: Δρ. Ηλίας Ζώης, Αναπληρωτής Καθηγητής
Φοιτητής: –
“Μοντελοποίηση και ανάπτυξη μη γραμμικού συστήματος ελέγχου για μη επανδρωμένα εναέρια οχήματα”

Available |
Σύντομη Περιγραφή:
Τα μη επανδρωμένα εναέρια οχήματα (unmanned aerial vehicles, UAVs) είναι οχήματα που δε μεταφέρουν πιλότο, αλλά η οδήγησή τους γίνεται είτε απομακρυσμένα, μέσω τηλεχειρισμού, είτε αυτόματα από κάποιον υπολογιστή. Μία από τις πιο συνηθισμένες κατηγορίες UAVs είναι τα τετρακόπτερα, τα οποία αποτελούνται από τέσσερις κινητήρες τοποθετημένους στις άκρες ενός κεντρικού κορμού αποτελούμενου από δύο κάθετους μεταξύ τους άξονες σε διαμόρφωση σταυρού. Ο αυτόματος έλεγχος ενός τετρακόπτερου είναι ένα δύσκολο πρόβλημα, καθώς το σύστημα είναι μη γραμμικό, ασταθές, υποδιεγειρόμενο, έχει πολλαπλές εισόδους και εξόδους και επιδεικνύει ισχυρά συζευγμένους όρους.
Σκοπός της παρούσας διπλωματικής εργασίας είναι η σχεδίαση ενός μη γραμμικού συστήματος ελέγχου βασισμένο στη μεθοδολογία ολίσθησης (sliding mode control – SMC) με απώτερο στόχο στην εφαρμογή του αναπτυχθέντος πλαισίου ελέγχου σε ένα πραγματικό τετρακόπτερο.
Ενδεικτικές Δημοσιεύσεις:
[1] Tripathi, V., Behera, L., Vermal, N., “Design of sliding mode and backstepping controllers for a quadcopter”, 39th National Systems Conference (NSC), 2015.
[2] Madani, T., Benallegue, A., “Backstepping Control for a Quadrotor Helicopter”, 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2006.
Απαραίτητες γνώσεις: Γραμμική θεωρία ελέγχου (ελεγκτές PID και γραμμική ανάδραση καταστάσεων), Περιγραφή δυναμικών συστημάτων στον χώρο κατάστασης, Γραμμική άλγεβρα, Γνώση προγραμματισμού σε περιβάλλον MATLAB
Γνώσεις που θα αποκτηθούν: Μη γραμμική θεωρία ελέγχου, Ευστάθεια δυναμικών συστημάτων, Θεωρία Lyapunov
Χώρος υλοποίησης της διπλωματικής: A109b – Ερευνητικό Εργαστήριο TelSiP
Επιβλέπων: Δρ. Αλέξανδρος Αλεξανδρίδης, Καθηγητής
Φοιτητής: –
“Ανάπτυξη αλγορίθμων σε περιβάλλον προγραμματισμού Python για λειτουργία αυτόνομων μη επανδρωμένων εναέριων οχημάτων”
Available |
Σύντομη Περιγραφή:
Τα μη επανδρωμένα εναέρια οχήματα (unmanned aerial vehicles, UAVs) είναι οχήματα που δε μεταφέρουν πιλότο, αλλά η οδήγησή τους γίνεται είτε απομακρυσμένα, μέσω τηλεχειρισμού, είτε αυτόματα από κάποιον υπολογιστή. Μία από τις πιο συνηθισμένες κατηγορίες UAVs είναι τα τετρακόπτερα, τα οποία αποτελούνται από τέσσερις κινητήρες τοποθετημένους στις άκρες ενός κεντρικού κορμού αποτελούμενου από δύο κάθετους μεταξύ τους άξονες σε διαμόρφωση σταυρού.
Η σωστή λειτουργία ενός αυτόνομου UAV απαιτεί τη συνεργασία και την εκτέλεση σε πραγματικό χρόνο κατάλληλων αλγορίθμων, οι οποίοι είναι υπεύθυνοι για την υλοποίηση συγκεκριμένων διαδικασιών, όπως για παράδειγμα η εκτίμηση των γωνιών προσανατολισμού του οχήματος (roll-pitch-yaw), η επεξεργασία των μετρήσεων που λαμβάνονται από τους αισθητήρες κ.ά. Σκοπός της παρούσας διπλωματικής εργασίας είναι η ανάπτυξη αλγορίθμων χρησιμοποιώντας τη γλώσσα προγραμματισμού Python με απώτερο στόχο την εφαρμογή και δοκιμή τους σε ένα πραγματικό τετρακόπτερο. Οι αλγόριθμοι που δύναται να αναπτυχθούν αφορούν την εκτίμηση του προσανατολισμού του οχήματος (complementary filter, extended Kalman filter, mahony orientation filter κλπ), την επεξεργασία των μετρήσεων από τους αισθητήρες (lowpass filters, analog filters, digital filters) καθώς επίσης και αλγόριθμοι ελέγχου όπως για παράδειγμα ένας PID ελεγκτής.
Ενδεικτικές Δημοσιεύσεις:
[1] Tellex, S., Brown, A., & Lupashin, S. (2018). Estimation for Quadrotors. arXiv preprint arXiv:1809.00037.
Απαραίτητες γνώσεις: Αντικειμενοστραφής προγραμματισμός, Γραμμική άλγεβρα, Βασική γνώση προγραμματισμού Python, Βασική εξοικείωση με Linux-like λειτουργικά συστήματα
Γνώσεις που θα αποκτηθούν: Ανάπτυξη βελτιστοποιημένων και προχωρημένων αλγορίθμων με εφαρμογή σε ενσωματωμένα συστήματα, Εμβάθυνση στον αντικειμενοστραφή προγραμματισμό και στη γλώσσα προγραμματισμού Python, Εξοικείωση με λογισμικό version control (git)
Χώρος υλοποίησης της διπλωματικής: A109b – Ερευνητικό Εργαστήριο TelSiP
Επιβλέπων: Δρ. Αλέξανδρος Αλεξανδρίδης, Καθηγητής
Φοιτητής: –
“Ανάπτυξη αλγορίθμων σε περιβάλλον προγραμματισμού C++ για λειτουργία αυτόνομων μη επανδρωμένων εναέριων οχημάτων”
Available |
Σύντομη Περιγραφή:
Τα μη επανδρωμένα εναέρια οχήματα (unmanned aerial vehicles, UAVs) είναι οχήματα που δε μεταφέρουν πιλότο, αλλά η οδήγησή τους γίνεται είτε απομακρυσμένα, μέσω τηλεχειρισμού, είτε αυτόματα από κάποιον υπολογιστή. Μία από τις πιο συνηθισμένες κατηγορίες UAVs είναι τα τετρακόπτερα, τα οποία αποτελούνται από τέσσερις κινητήρες τοποθετημένους στις άκρες ενός κεντρικού κορμού αποτελούμενου από δύο κάθετους μεταξύ τους άξονες σε διαμόρφωση σταυρού.
Η σωστή λειτουργία ενός αυτόνομου UAV απαιτεί τη συνεργασία και την εκτέλεση σε πραγματικό χρόνο κατάλληλων αλγορίθμων, οι οποίοι είναι υπεύθυνοι για την υλοποίηση συγκεκριμένων διαδικασιών, όπως για παράδειγμα η εκτίμηση των γωνιών προσανατολισμού του οχήματος (roll-pitch-yaw), η επεξεργασία των μετρήσεων που λαμβάνονται από τους αισθητήρες κ.ά. Σκοπός της παρούσας διπλωματικής εργασίας είναι η ανάπτυξη αλγορίθμων χρησιμοποιώντας τη γλώσσα προγραμματισμού C++ με απώτερο στόχο την εφαρμογή και δοκιμή τους σε ένα πραγματικό τετρακόπτερο. Οι αλγόριθμοι που δύναται να αναπτυχθούν αφορούν την εκτίμηση του προσανατολισμού του οχήματος (complementary filter, extended Kalman filter, mahony orientation filter κλπ), την επεξεργασία των μετρήσεων από τους αισθητήρες (lowpass filters, analog filters, digital filters) καθώς επίσης και αλγόριθμοι ελέγχου όπως για παράδειγμα ένας PID ελεγκτής.
Ενδεικτικές Δημοσιεύσεις:
[1] Tellex, S., Brown, A., & Lupashin, S. (2018). Estimation for Quadrotors. arXiv preprint arXiv:1809.00037.
Απαραίτητες γνώσεις: Αντικειμενοστραφής προγραμματισμός, Γραμμική άλγεβρα, Βασική γνώση προγραμματισμού C++ (data types, pointers), Βασική εξοικείωση με Linux-like λειτουργικά συστήματα
Γνώσεις που θα αποκτηθούν: Ανάπτυξη βελτιστοποιημένων και προχωρημένων αλγορίθμων με εφαρμογή σε ενσωματωμένα συστήματα, Εμβάθυνση στον αντικειμενοστραφή προγραμματισμό και στη γλώσσα προγραμματισμού C++, Εξοικείωση με λογισμικό version control (git)
Χώρος υλοποίησης της διπλωματικής: A109b – Ερευνητικό Εργαστήριο TelSiP
Επιβλέπων: Δρ. Αλέξανδρος Αλεξανδρίδης, Καθηγητής
Φοιτητής: –
“Ανάπτυξη driver για αισθητήρες σε αυτόνομα μη επανδρωμένα οχήματα”
Available |
Σύντομη Περιγραφή:
Η αυτόνομη λειτουργία των μη επανδρωμένων οχημάτων (εναέριων, υποβρύχιων, εδάφους) απαιτεί τη λήψη μετρήσεων σε πραγματικό χρόνο από κατάλληλους αισθητήρες, οι οποίοι είναι τοποθετημένοι στον ηλεκτρονικό «εγκέφαλο» (πλακέτα) του οχήματος. Ένας από τους πιο βασικούς αισθητήρες που υπάρχει σε όλα τα συγκεκριμένα οχήματα είναι ο αισθητήρας Inertial Measurement Unit (IMU), ο οποίος αποτελείται κυρίως από ένα γυροσκόπιο και ένα επιταχυνσιόμετρο 3 αξόνων (6 Degrees of Freedom IMU) και σε πολλές περιπτώσεις και από μία ψηφιακή πυξίδα (μαγνητόμετρο) (9 Degrees of Freedom IMU). Η χρήση του γυροσκοπίου επιτρέπει τη μέτρηση των γωνιακών ταχυτήτων του οχήματος ως προς τους 3 άξονες κίνησης, το επιταχυνσιόμετρο παρέχει μετρήσεις των σχετικών γραμμικών επιταχύνσεων και το μαγνητόμετρο επιτρέπει τη λήψη μετρήσεων σχετικών με τον προσανατολισμό του οχήματος.
Σκοπός της παρούσας διπλωματικής εργασίας είναι η ανάπτυξη του driver επικοινωνίας σε γλώσσα προγραμματισμού Python για τον αισθητήρα IMU LSM9DS1 με την ηλεκτρονική πλακέτα Navio2. Πιο συγκεκριμένα, στόχος είναι η συγγραφή το κώδικα που θα επιτρέπει το διάβασμα των καταχωρητών (registers) του αισθητήρα προκειμένου να είναι δυνατή η λήψη των μετρήσεων. Βασικός στόχος της εργασίας είναι η εφαρμογή και δοκιμή του αναπτυχθέντος αλγορίθμου σε ένα πραγματικό τετρακόπτερο που είναι εξοπλισμένο με τον συγκεκριμένο αισθητήρα και την πλακέτα Navio2.
Ενδεικτικά Link:
[1] https://www.st.com/resource/en/datasheet/lsm9ds1.pdf
[2] https://docs.emlid.com/navio2/
Απαραίτητες γνώσεις: Γνώση προγραμματισμού Python, Βασικές γνώσεις ενσωματωμένων συστημάτων (δεκαεξαδικό σύστημα αρίθμησης, καταχωρητές (registers), διευθύνσεις καταχωρητών)
Γνώσεις που θα αποκτηθούν: Ανάπτυξη driver επικοινωνίας αισθητήρων με ηλεκτρονικές πλακέτες, προχωρημένες γνώσεις προγραμματισμού ενσωματωμένων συστημάτων, Εξοικείωση με λογισμικό version control (git)
Χώρος υλοποίησης της διπλωματικής: A109b – Ερευνητικό Εργαστήριο TelSiP
Επιβλέπων: Δρ. Αλέξανδρος Αλεξανδρίδης, Καθηγητής
Φοιτητής: –
“Ανάπτυξη πλαισίου ασύρματης επικοινωνίας μη επανδρωμένου εναέριου οχήματος σε περιβάλλον Robot Operating System (ROS)”
Available |
Σύντομη Περιγραφή:
Τα μη επανδρωμένα εναέρια οχήματα (unmanned aerial vehicles, UAVs) είναι οχήματα που δε μεταφέρουν πιλότο, αλλά η οδήγησή τους γίνεται είτε απομακρυσμένα, μέσω τηλεχειρισμού, είτε αυτόματα από κάποιον υπολογιστή. Μία από τις πιο συνηθισμένες κατηγορίες UAVs είναι τα τετρακόπτερα, τα οποία αποτελούνται από τέσσερις κινητήρες τοποθετημένους στις άκρες ενός κεντρικού κορμού αποτελούμενου από δύο κάθετους μεταξύ τους άξονες σε διαμόρφωση σταυρού.
Σκοπός της παρούσας διπλωματικής εργασίας είναι η ανάπτυξη ενός πλαισίου που θα επιτρέπει την επικοινωνία σε πραγματικό χρόνο μεταξύ ενός τετρακόπερου και ενός υπολογιστή που θα είναι τοποθετημένος στο έδαφος απομακρυσμένα. Στόχος είναι η λήψη και η αποστολή σημάτων μεταξύ των δύο κόμβων επικοινωνίας (τετρακόπτερο – υπολογιστής εδάφους), τα οποία θα περιλαμβάνουν για παράδειγμα μετρήσεις από τους αισθητήρες του τετρακόπτερου ή τις τιμές των σημάτων που πρέπει να εφαρμοστούν σε κάθε χρονική στιγμή στους κινητήρες του οχήματος. Βασικός σκοπός της εργασίας είναι η εφαρμογή του αναπτυχθέντος πλαισίου επικοινωνίας σε υπάρχον πραγματικό τετρακόπτερο.
Ο κώδικας που θα αναπτυχθεί και θα εκτελείται στο τετρακόπτερο δύναται να υλοποιηθεί σε γλώσσα προγραμματισμού Python ή C++, ενώ ο κώδικας που θα εκτελείται στον υπολογιστή εδάφους δύναται να υλοποιηθεί σε περιβάλλον προγραμματισμού Python, C++ ή MATLAB. Σε οποιαδήποτε περίπτωση ο κώδικας θα αναπτυχθεί χρησιμοποιώντας τις βιβλιοθήκες του Robot Operating System (ROS), οι οποίες είναι ανοιχτού κώδικα (open-source).
Ενδεικτικά Link:
[2] https://www.mathworks.com/help/ros/ug/get-started-with-ros.html
Απαραίτητες γνώσεις: Αντικειμενοστραφής προγραμματισμός, Γνώσεις προγραμματισμού C++/Python/MATLAB
Γνώσεις που θα αποκτηθούν: Χρήση του ευρέως διαδεδομένου πλαισίου προγραμματισμού για ρομποτικά συστήματα ROS, Προχωρημένες γνώσεις αντικειμενοστραφούς προγραμματισμού, Εξοικείωση με λογισμικό version control (git)
Χώρος υλοποίησης της διπλωματικής: A109b – Ερευνητικό Εργαστήριο TelSiP
Επιβλέπων: Δρ. Αλέξανδρος Αλεξανδρίδης, Καθηγητής
Φοιτητής: –
“Εκπαίδευση Νευρωνικών Δικτύων σε γραφικούς επιταχυντές γενικής χρήσης (GPGPUs)”
Available |
Σύντομη Περιγραφή:
Η χρήση και εκπαίδευση μοντέλων βαθιάς μηχανικής μάθησης (deep learning), όπως τα τεχνητά νευρωνικά δίκτυα (ANNs), απαιτεί μεγάλο υπολογιστικό κόστος και πολλές φορές η διαδικασία είναι ιδιαίτερα χρονοβόρα. Σκοπός του συγκεκριμένου θέματος διπλωματικής εργασίας, θα είναι η σύγκριση υλοποίησης αλγορίθμων εκπαίδευσης τεχνητών νευρωνικών δικτύων (ANNs) με χρήση γραφικών επιταχυντών και την πλατφόρμα CUDA (Compute Unified Device Architecture) [1] σε σχέση με τους κλασικούς επεξεργαστές (CPUs). Περίπτωση εφαρμογής, θα αποτελέσουν αρχιτεκτονικές δικτύων [2] με μεγάλο αριθμό συνδέσεων όπως τα συνελικτικά νευρωνικά δίκτυα (Convolutional Neural Networks – CNNs).
Ενδεικτικές Δημοσιεύσεις:
[1] L. Oden, “Lessons learned from comparing C-CUDA and Python-Numba for GPU-Computing,” Proc. – 2020 28th Euromicro Int. Conf. Parallel, Distrib. Network-Based Process. PDP 2020, pp. 216–223, Mar. 2020, doi: 10.1109/PDP50117.2020.00041.
[2] J. Pendlebury, H. Xiong, and R. Walshe, “Artificial neural network simulation on CUDA,” Proc. – IEEE Int. Symp. Distrib. Simul. Real-Time Appl. DS-RT, pp. 228–233, 2012, doi: 10.1109/DS-RT.2012.40.
Απαραίτητες γνώσεις: Υπολογιστική Νοημοσύνη, Άριστη Γνώση Προγραμματισμού (Python), Γραμμική Άλγεβρα
Χώρος υλοποίησης της διπλωματικής: A109b – Ερευνητικό Εργαστήριο TelSiP
Επιβλέπων: Δρ. Αλέξανδρος Αλεξανδρίδης, Καθηγητής
Φοιτητής: –